|
I am a researcher at Beijing Academy of Artificial Intelligence (BAAI). I received my PhD degree from the School of Software, Tsinghua University, advised by Prof. Yu-Shen Liu. My research interests lie in the area of 3D computer vision, 3D foundation models, 3D reconstruction, multi-view 3D reconstruction and surface reconstruction from point clouds. Email | GitHub | Google Scholar | LinkedIn |

|
|
(*: Equal Contribution, #: corresponding author) |
|
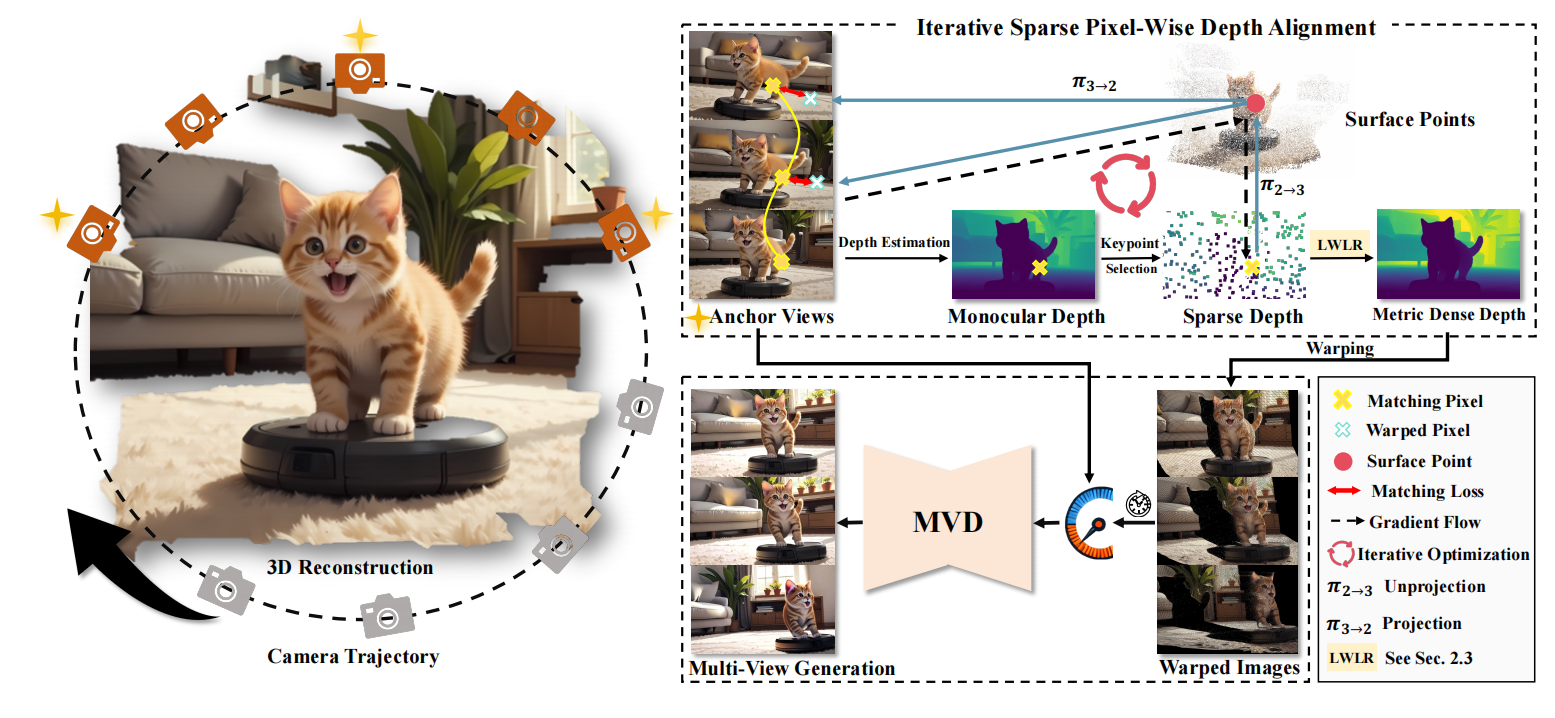
Baorui Ma*, Huachen Gao*, Haoge Deng*, Zhengxiong Luo,Tiejun Huang, Lulu Tang#,Xinlong Wang# Conference on Computer Vision and Pattern Recognition (CVPR, CCF-A), 2025 (Highlight, ~3% acceptance rate) [arxiv] | [Project page] | [Code] | [Dataset] | [Post] See3D is a scalable visual-conditional MVD model for open-world 3D creation, which can be trained on web-scale video collections without camera pose annotations. |
|
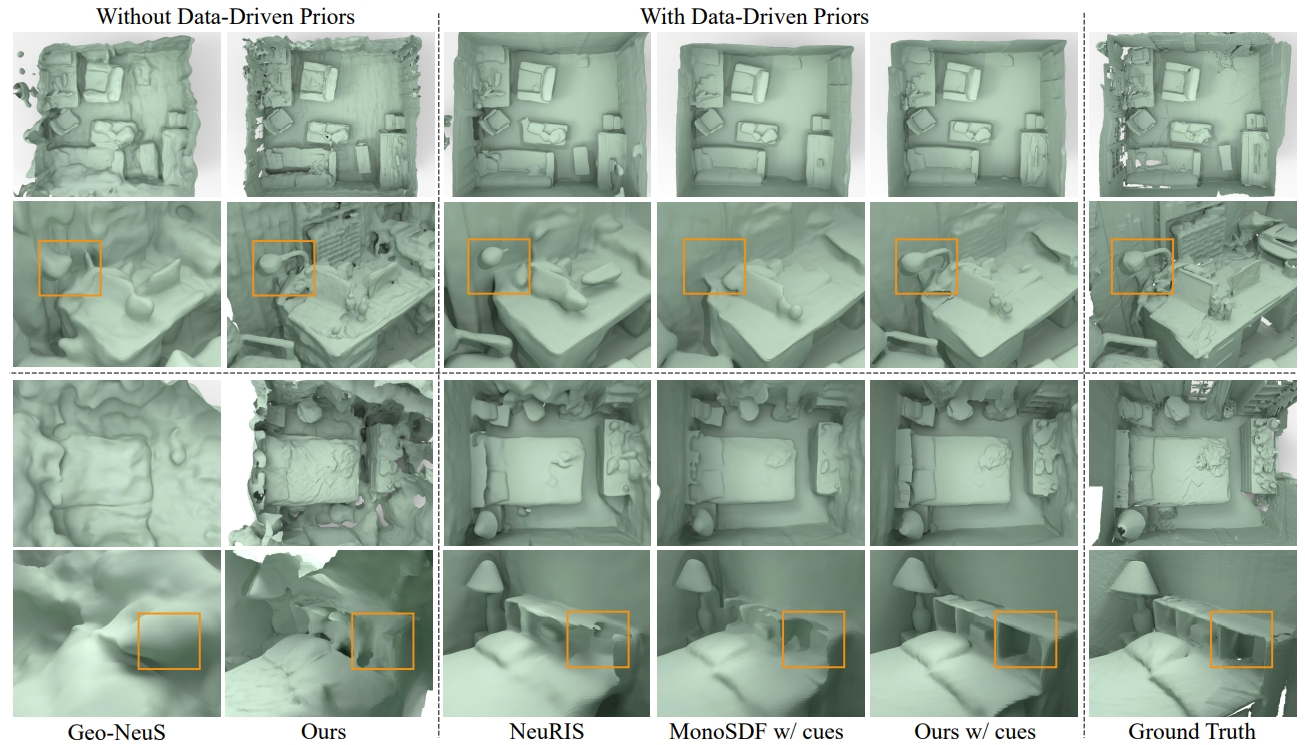
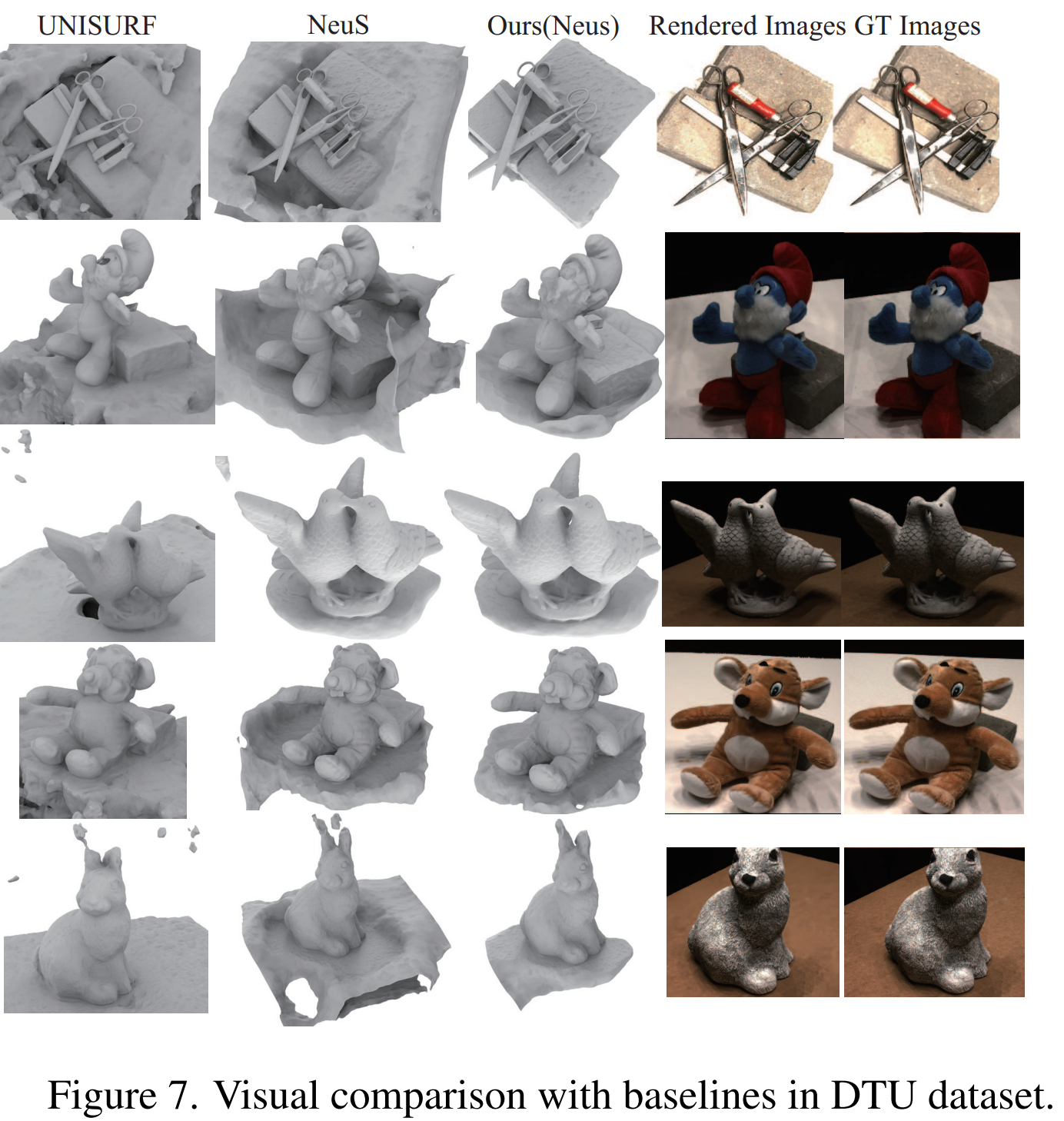
Wenyuan Zhang , Emily Yue-ting Jia, Junsheng Zhou, Baorui Ma, Kanle Shi, Yu-Shen Liu, Zhizhong Han Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 (Highlight, ~3% acceptance rate) project page | arXiv We present NeRFPrior, which adopts a neural radiance field as a prior to learn signed distance fields using volume rendering for indoor scene surface reconstruction. |
|
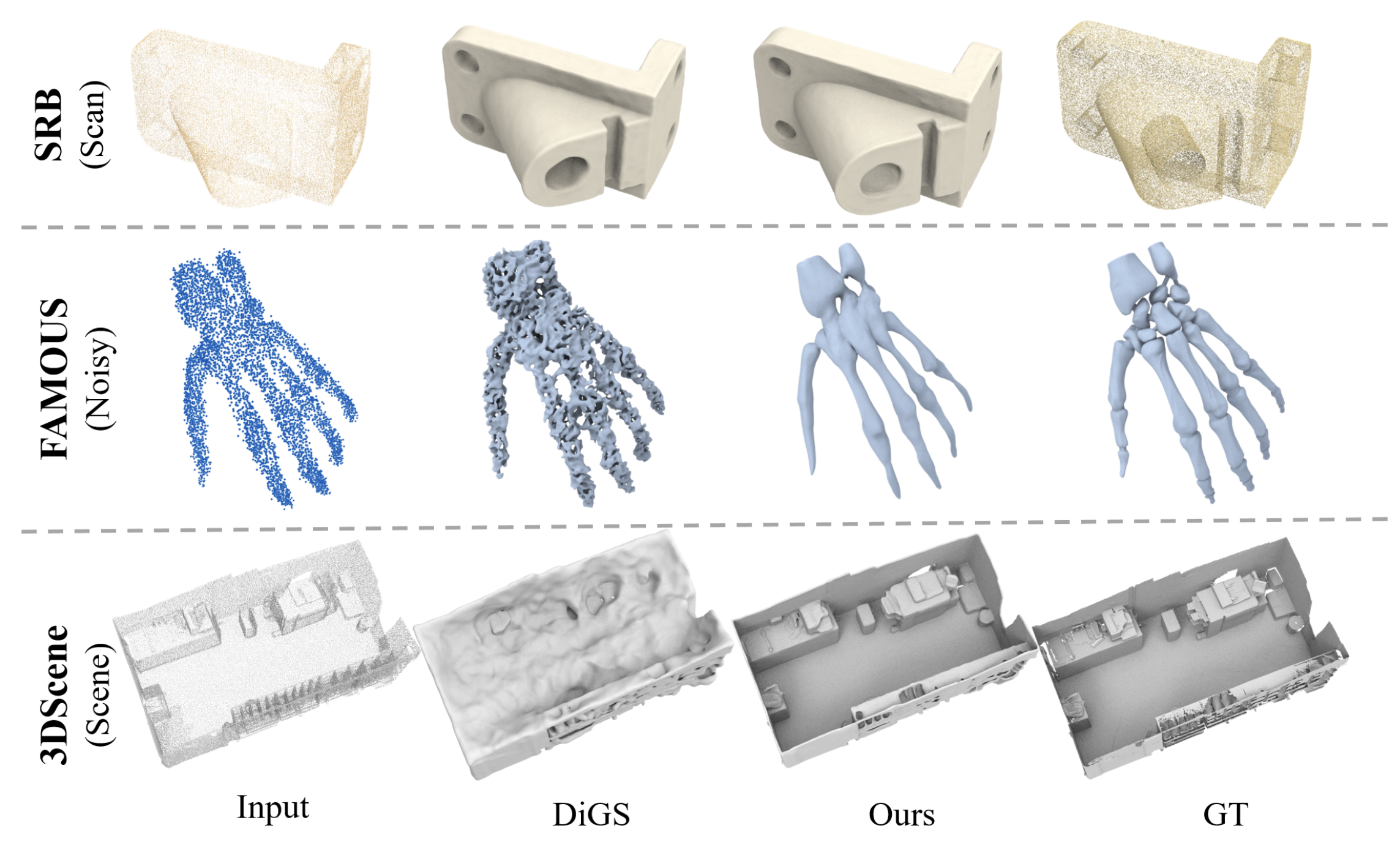
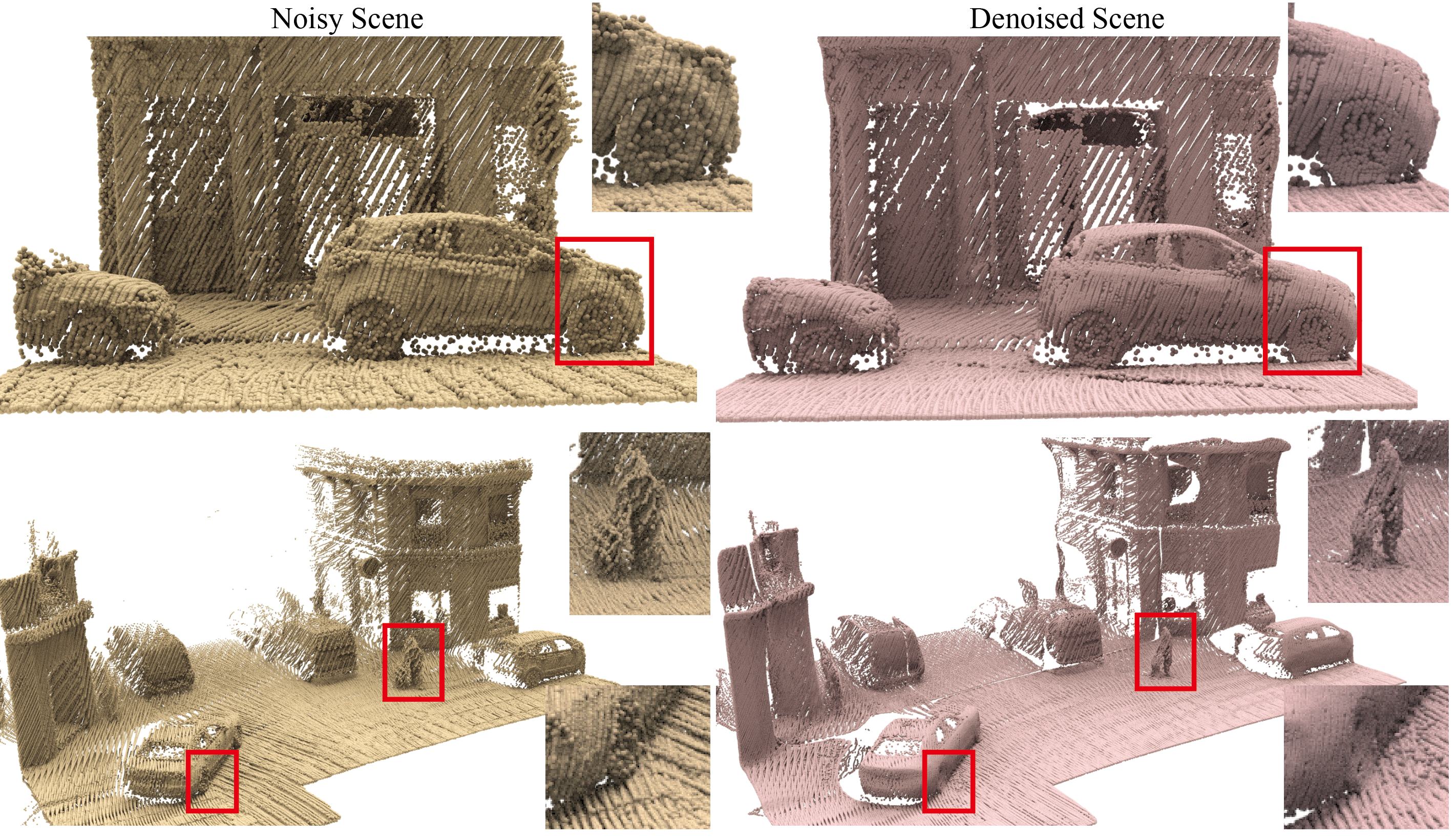
Junsheng Zhou* , Baorui Ma*, Yu-Shen Liu, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024 project page | IEEE Xplore | arXiv | code We present a fast learning framework capable of inferring signed distance functions from noisy shapes within one minute through noise-to-noise mapping. |

|
Junsheng Zhou* , Weiqi Zhang*, Baorui Ma#, Kanle Shi, Yu-Shen Liu#, Zhizhong Han arXiv, 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 project page | arXiv | code UDiFF is a 3D diffusion model for unsigned distance fields (UDFs) which is capable to generate textured 3D shapes with open surfaces from text conditions or unconditionally. |
|
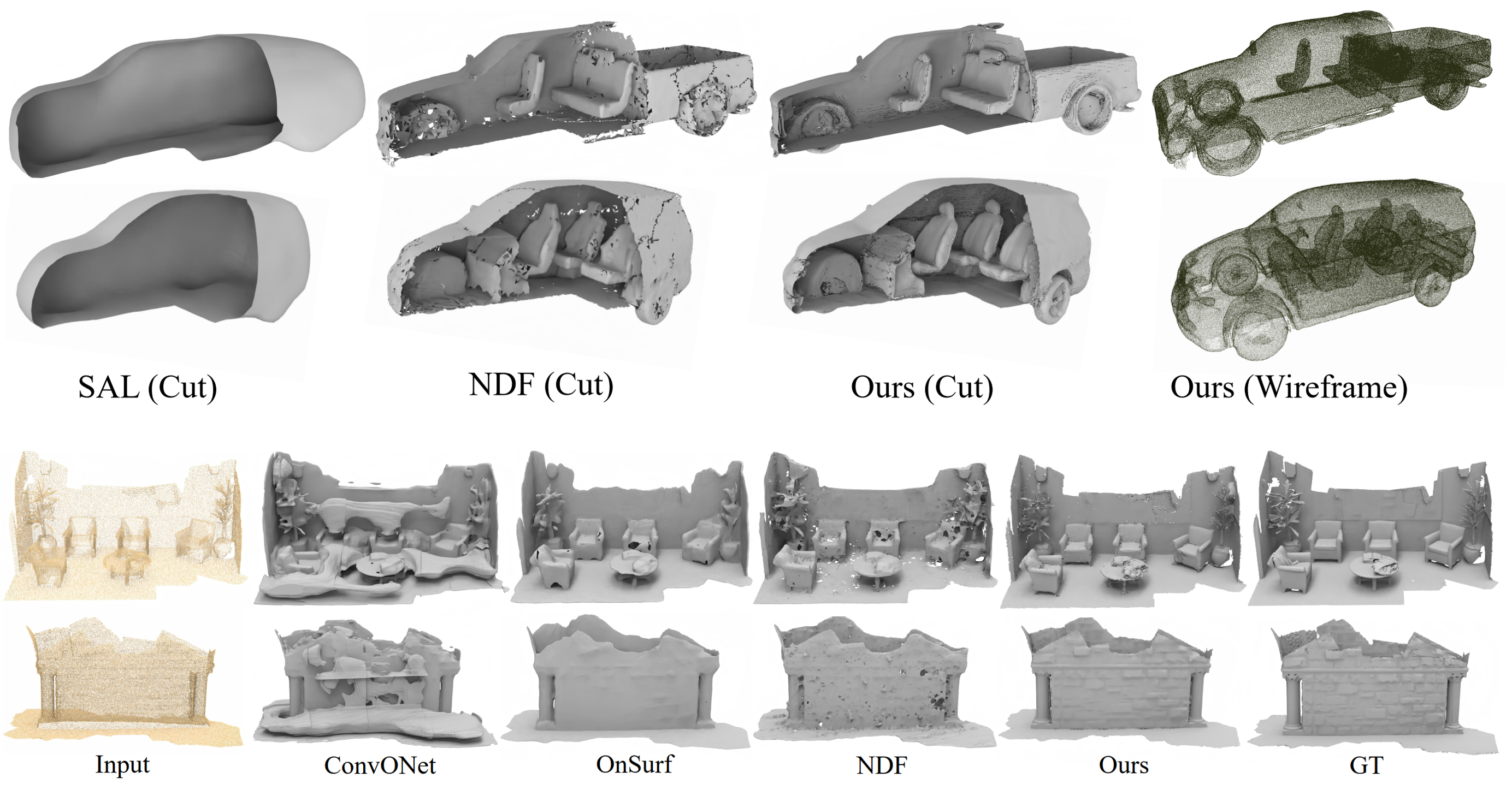
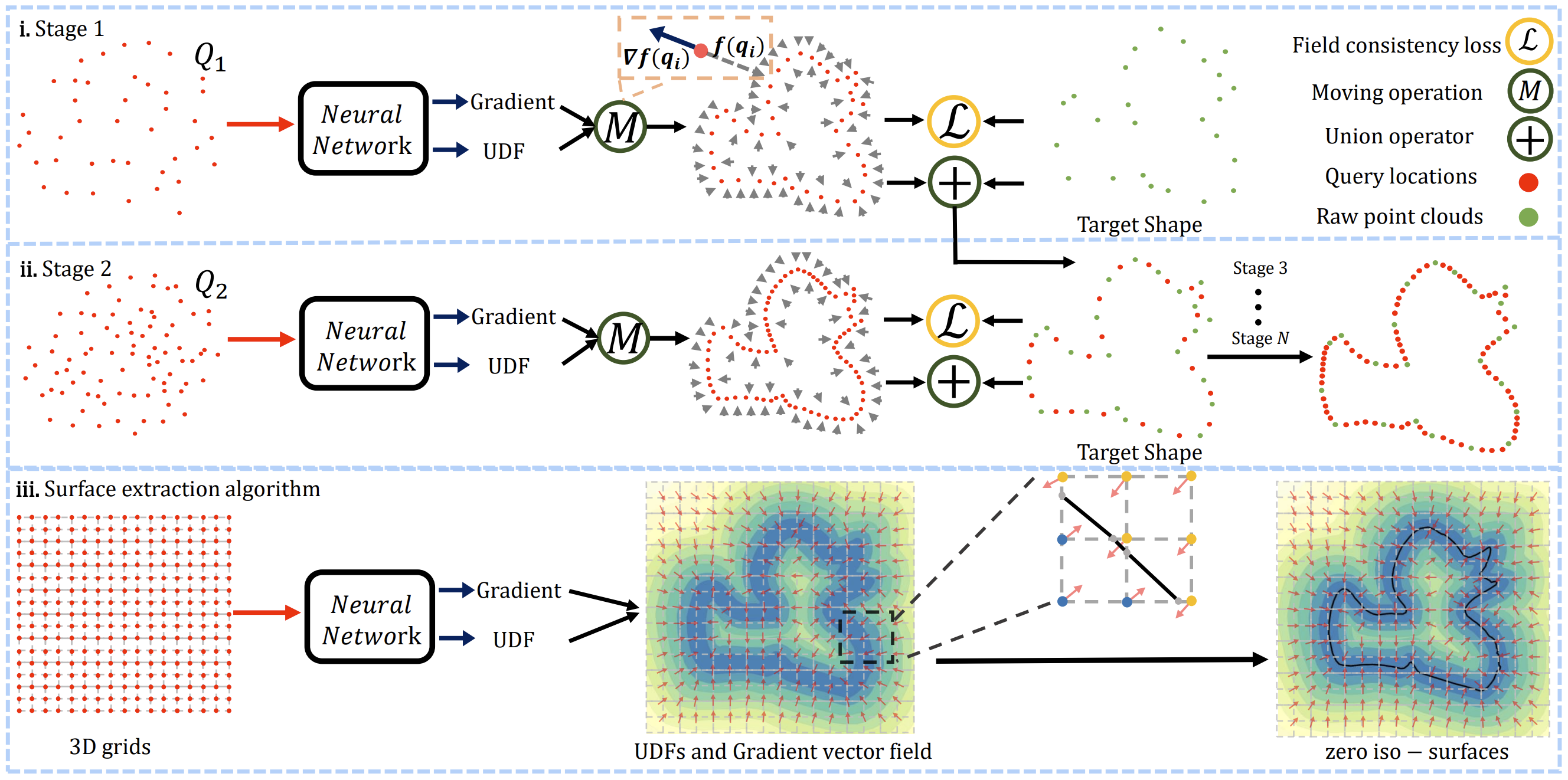
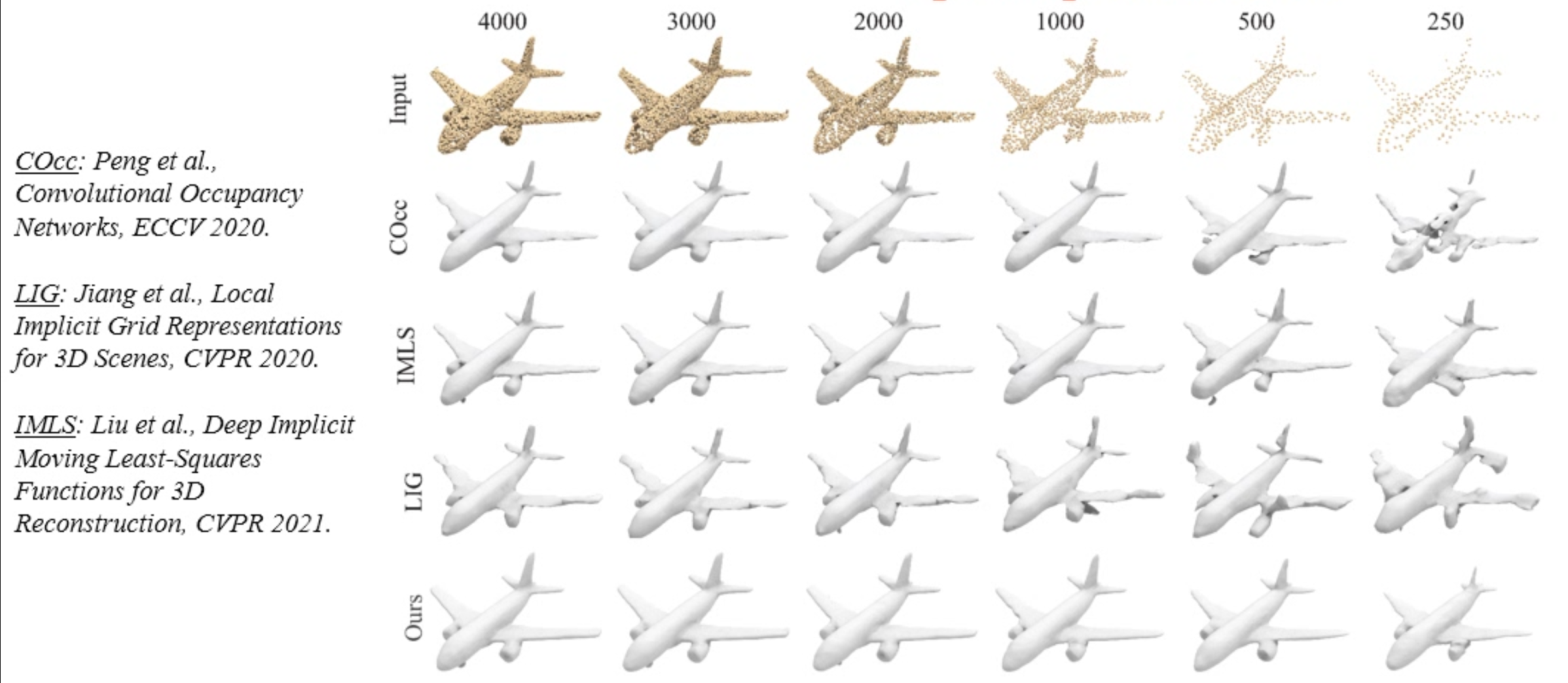
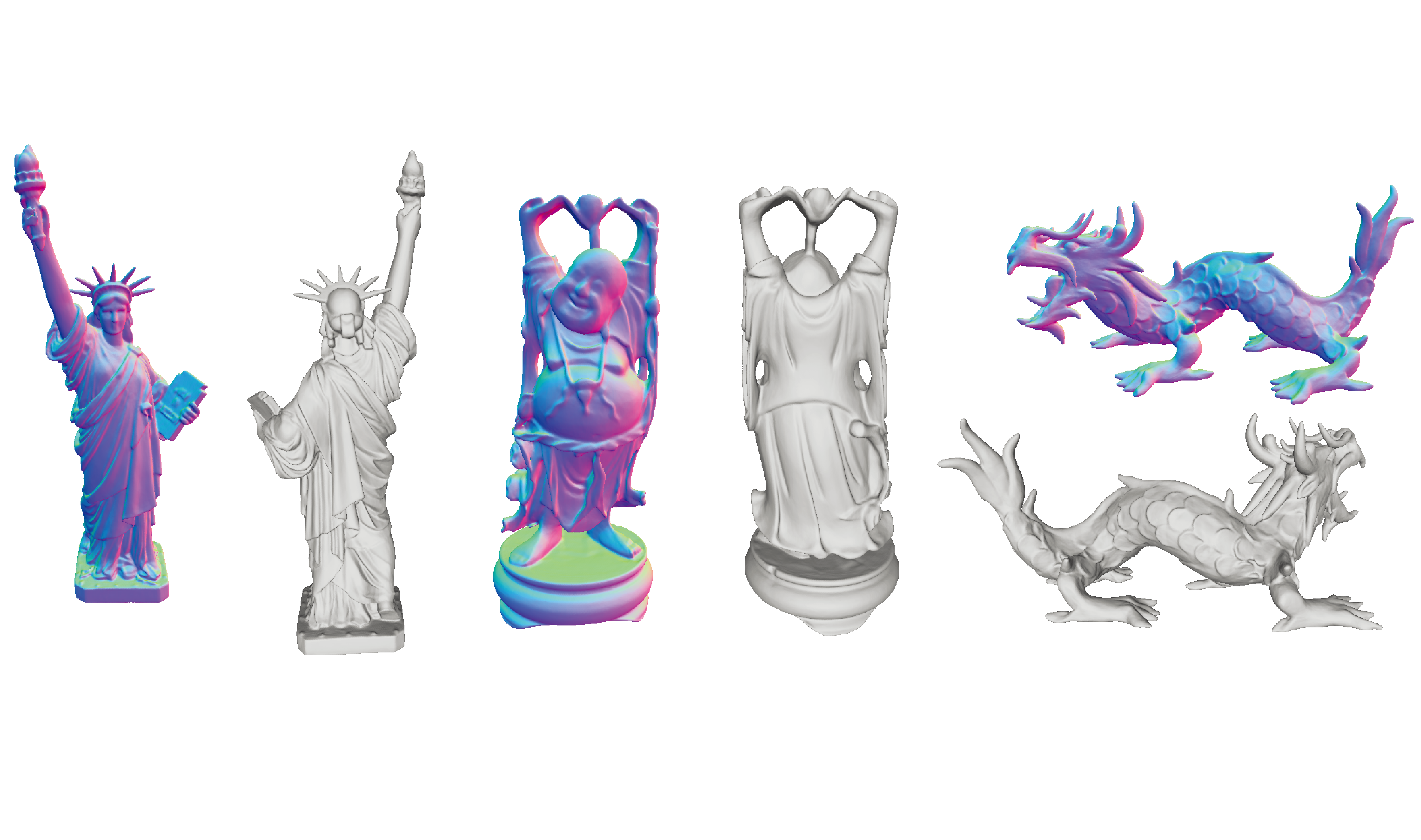
Junsheng Zhou* , Baorui Ma*, Shujuan Li, Yu-Shen Liu#, Yi Fang, Zhizhong Han IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024 project page | IEEE Xplore | arXiv | code We present CAP-UDF to represent shapes and scenes with arbitrary architecture by learning a Consistency-Aware unsigned distance function Progressively. |
|
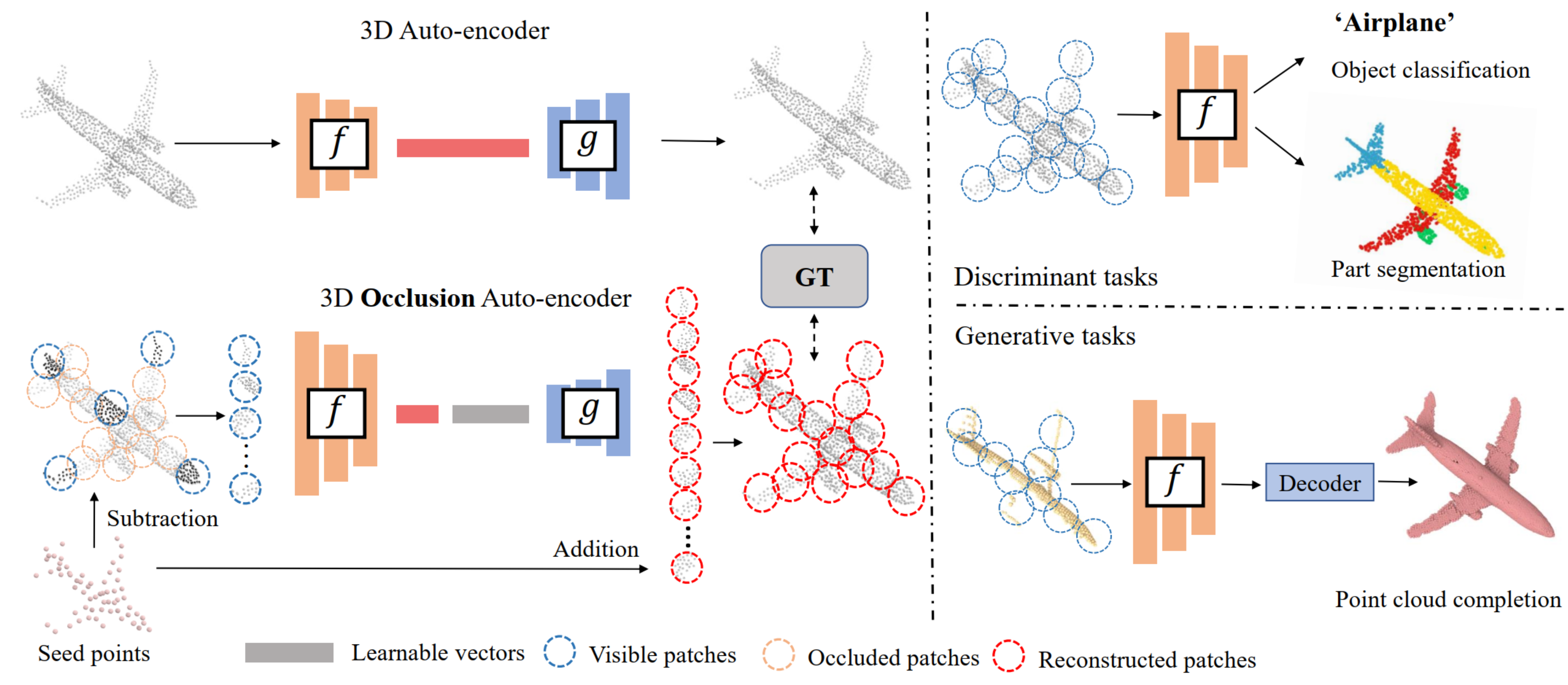
Junsheng Zhou* , Xin Wen*, Baorui Ma, Yu-Shen Liu#, Yue Gao, Yi Fang, Zhizhong Han IEEE International Conference on Robotics and Automation (ICRA), 2024 (Oral) project page | arXiv | code We present 3D-OAE, a novel self-supervised point cloud representation learning framework which is highly efficient and can be further transferred to various downstream tasks. |
|
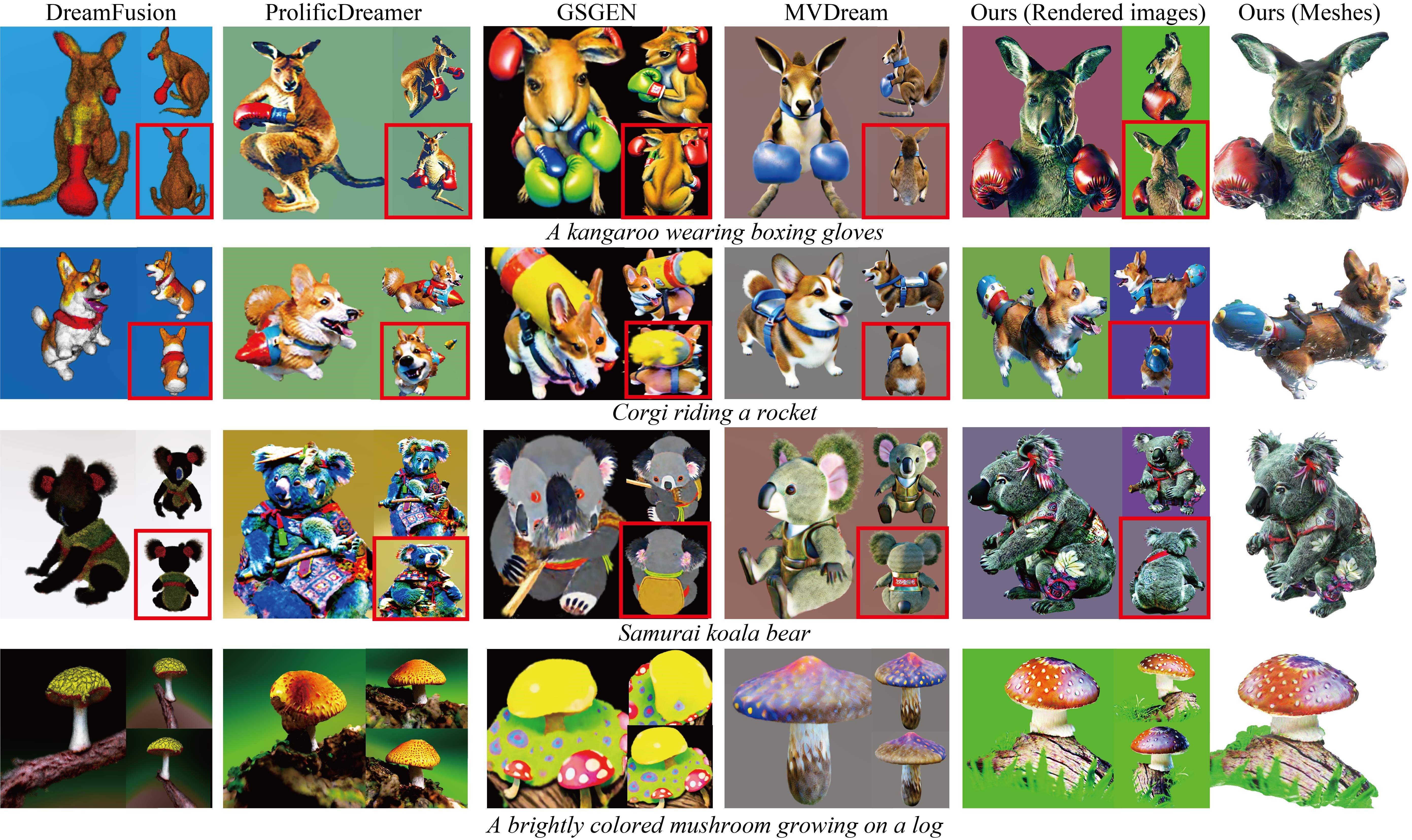
Baorui Ma*#, Haoge Deng*, Junsheng Zhou , Yu-Shen Liu, Tiejun Huang, Xinlong Wang# arXiv 2023. project page | arXiv | code We present GeoDream, a 3D generation method that incorporates explicit generalized 3D priors with 2D diffusion priors to enhance the capability of obtaining unambiguous 3D consistent geometric structures without sacrificing diversity or fidelity. |
|
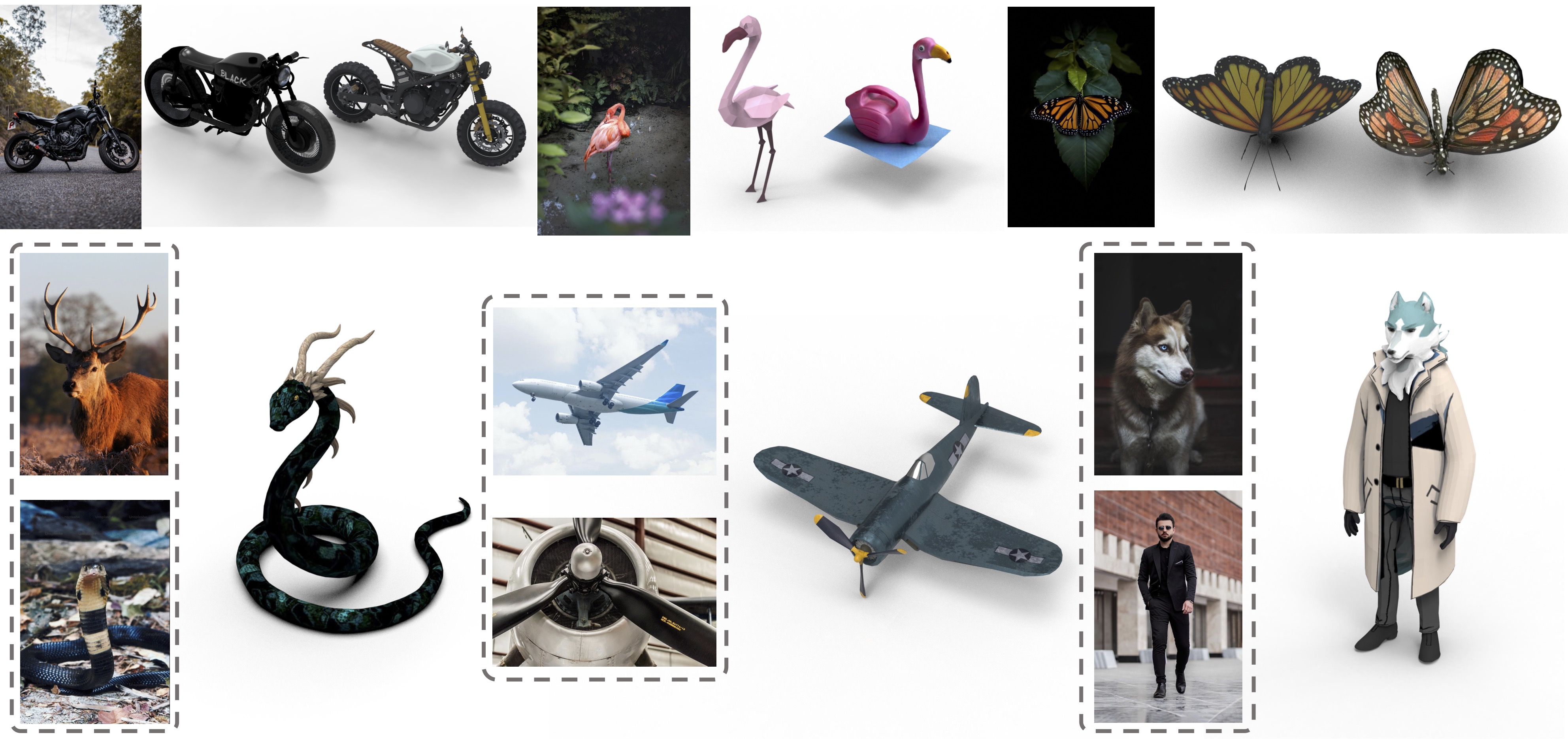
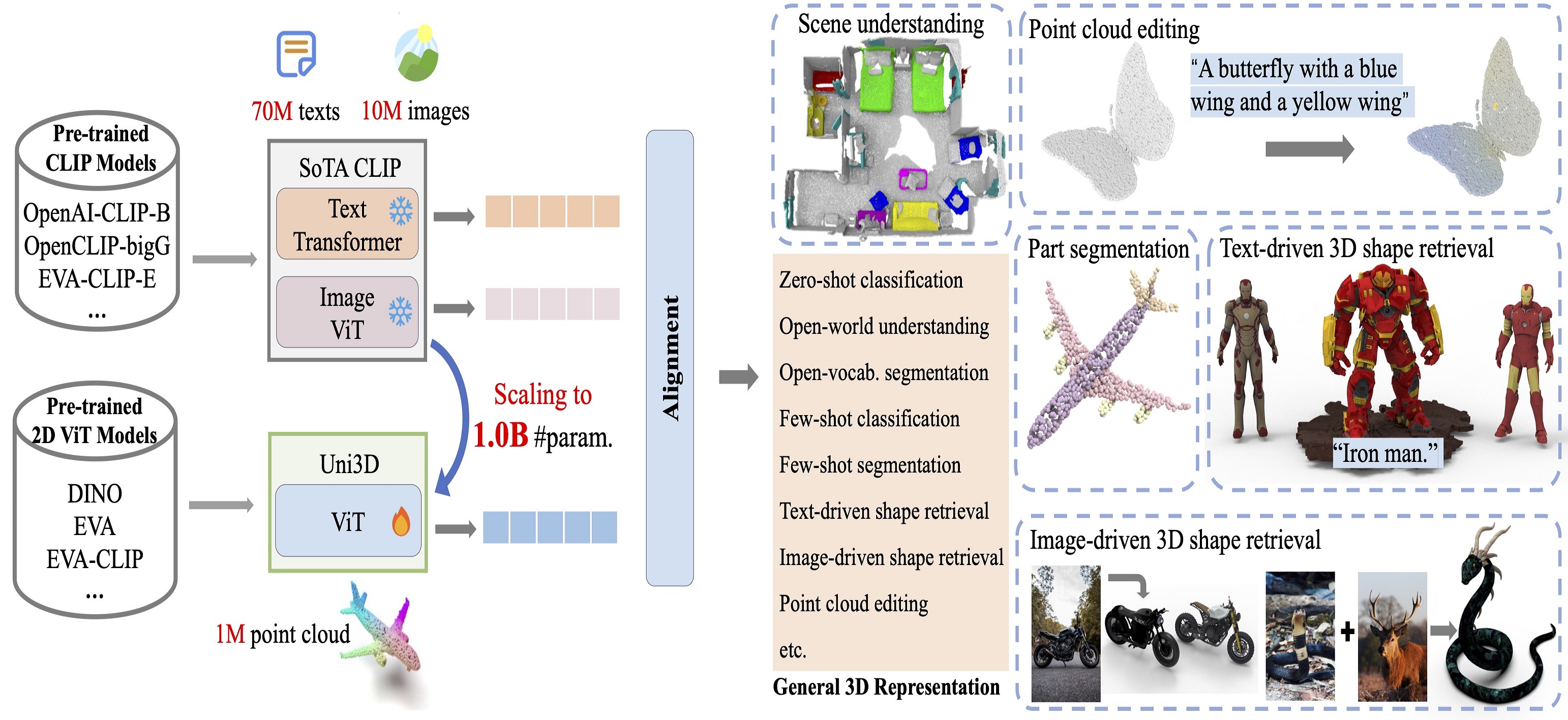
Junsheng Zhou* , Jinsheng Wang*, Baorui Ma*#, Yu-Shen Liu, Tiejun Huang, Xinlong Wang# International Conference on Learning Representations (ICLR, TH-CPL A), 2024 (Spotlight, ~5% acceptance rate) Model Zoo | arXiv | code We present Uni3D, a unified and scalable 3D pretraining framework for large-scale 3D representation learning, and explore its limits at the scale of one billion parameters. |
|
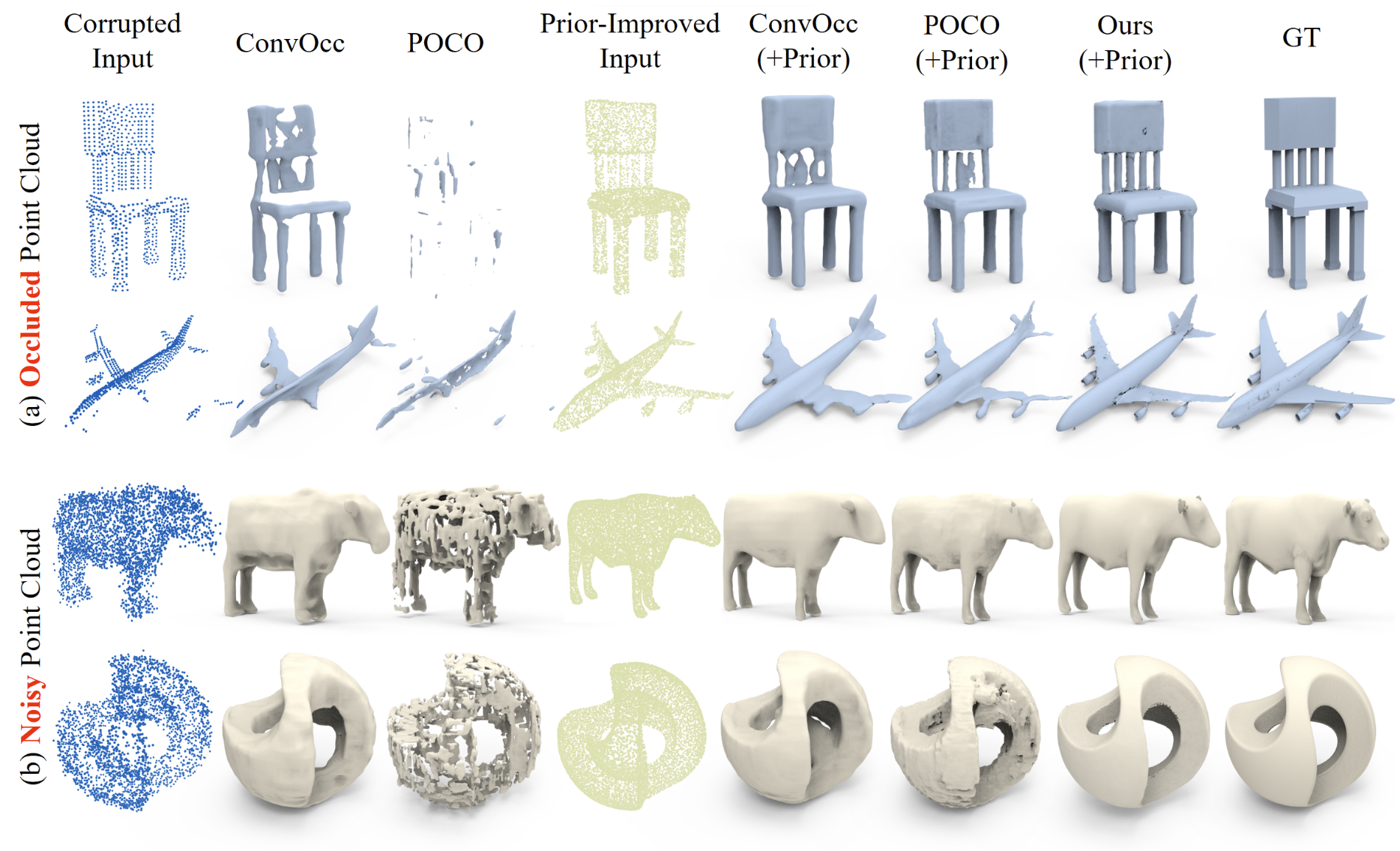
Junsheng Zhou* , Baorui Ma*, Wenyuan Zhang, Yi Fang, Yu-Shen Liu#, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS, CCF-A), 2023 (Spotlight, ~3.6% acceptance rate) project page | arXiv | code |
|
Junsheng Zhou* , Baorui Ma*, Shujuan Li, Yu-Shen Liu#, Zhizhong Han IEEE/CVF International Conference on Computer Vision (ICCV, CCF-A), 2023 project page | arXiv | code |
 |
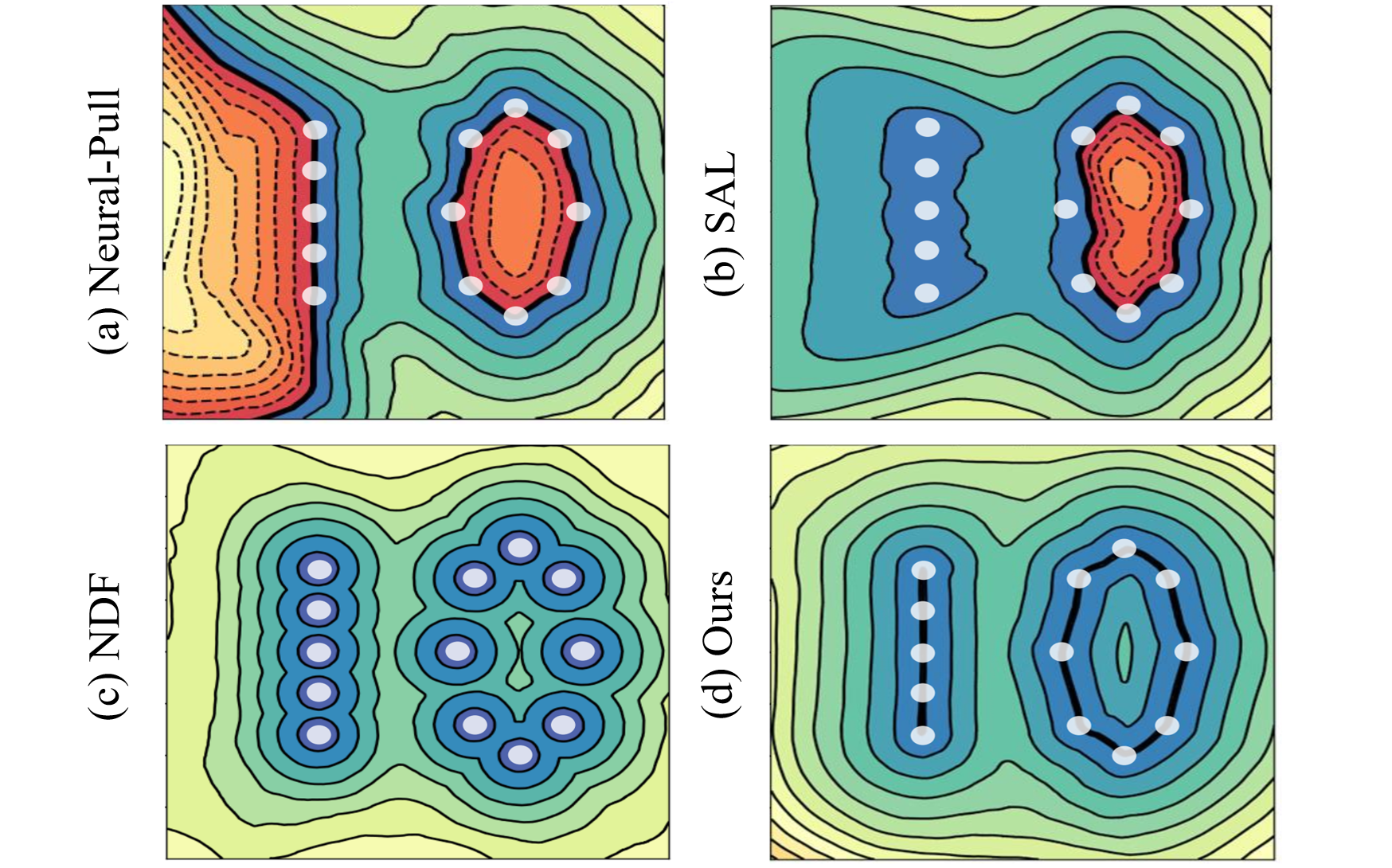
Baorui Ma, Yu-Shen Liu#, Zhizhong Han International Conference on Machine Learning (ICML, CCF-A), 2023 (Oral, ~2.3% acceptance rate) paper | code |
 |
Baorui Ma*, Junsheng Zhou* , Yu-Shen Liu#, Zhizhong Han Conference on Computer Vision and Pattern Recognition (CVPR, CCF-A), 2023 paper | project page | code |
 |
Shujuan Li*, Junsheng Zhou* Baorui Ma, Yu-Shen Liu#, Zhizhong Han AAAI Conference on Computing on Artificial Intelligence (AAAI, CCF-A), 2023 (Oral, ~10% acceptance rate) paper | project page | code |
|
Junsheng Zhou* , Baorui Ma* , Yu-Shen Liu#, Yi Fang, Zhizhong Han Conference on Neural Information Processing Systems (NeurIPS, CCF-A), 2022 paper | project page | code We present CAP-UDF to represent shapes and scenes with arbitrary architecture by learning a Consistency-Aware unsigned distance function Progressively. |
 |
Baorui Ma, Yu-Shen Liu#, Zhizhong Han Conference on Computer Vision and Pattern Recognition (CVPR, CCF-A), 2022 paper | project page | code |
 |
Baorui Ma, Yu-Shen Liu#, Matthias Zwicker Zhizhong Han Conference on Computer Vision and Pattern Recognition (CVPR, CCF-A), 2022 paper | project page | code |
 |
Baorui Ma*, Zhizhong Han* Yu-Shen Liu#, Matthias Zwicker International Conference on Machine Learning (ICML, CCF-A), 2021 (Spotlight) paper | code |
 |
Zhizhong Han, Baorui Ma, Matthias Zwicker, Yu-Shen Liu# IEEE Transactions on Image Processing (SCI, Impact factor: 9.34) (TIP, CCF-A), 2020 paper | Demo |
|
|
|
template adapted from this awesome website
|